Als erstes habe ich den Flyduino zusammengebaut.
 |
| Flyduino |
Danach war das Sensorboard mit BM020 und Nintendo Wii Motion Plus dran:
 |
| Einzelteile Sensorbob |
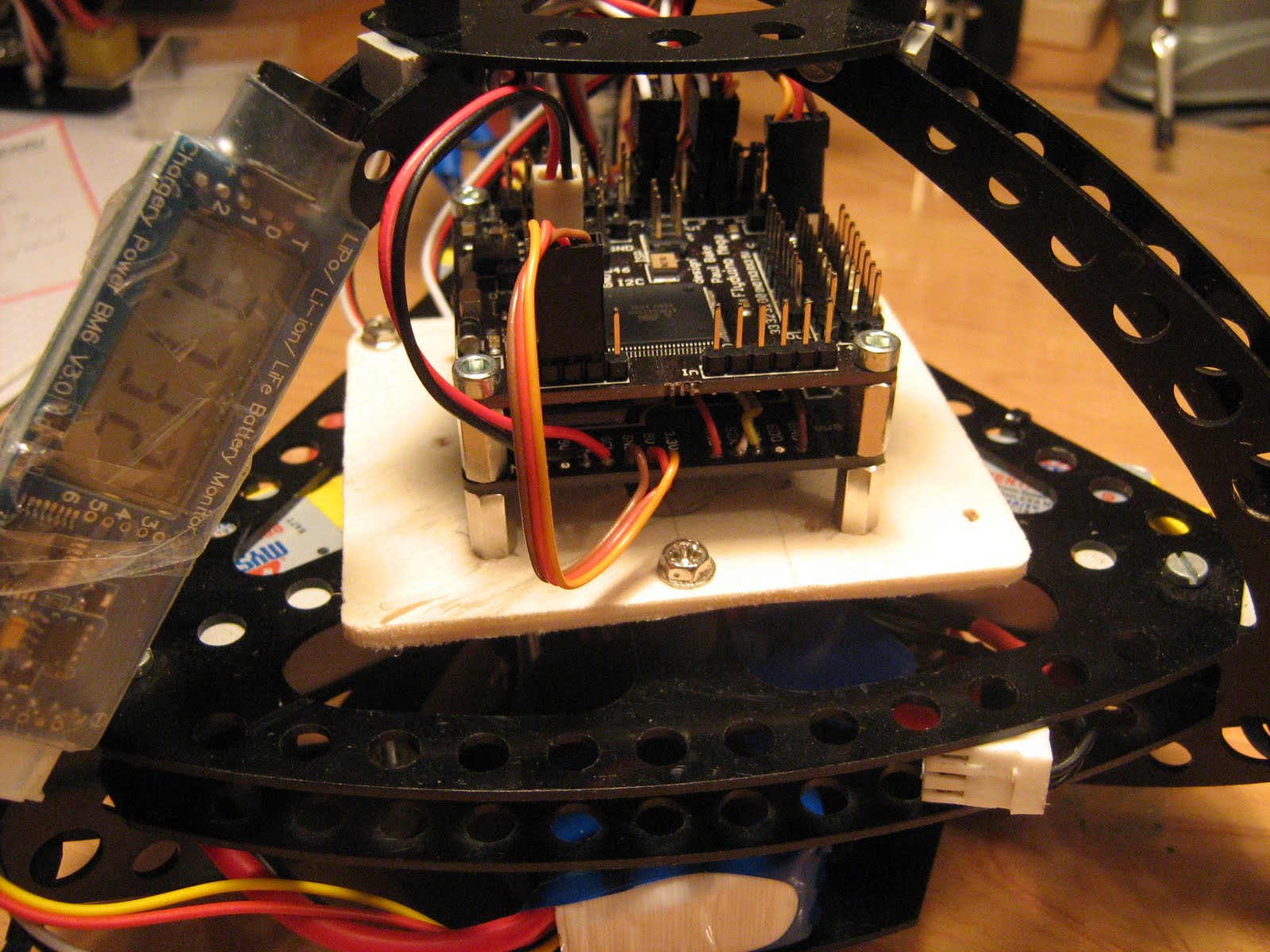
 |
| Fertiger Sensorbob |
Dann war die Flydubution zur Spannungsverteilung dran:
 |
| Flydubution |
Die Inbetriebnahme hat reibungslos geklappt, ich habe die Multiwii Software aufgespielt und alle Sensorwerte waren OK, die GUI ist auch wirklich sehr komfortabel.
 |
| Fertige Steuerung |
Die Herausforderung war nun Vip3r zu zerlegen und die TriGUIDE gegen den Flyduino zu ersetzen. Und das hat auch tadellos geklappt, ich musste lediglich einige Parameter im Code anpassen und fertig war die Tricoptersteuerung:
 |
| Viip3r |
Nachdem die Steuerung angeschlossen und eingebaut war habe ich mich gleich an den Erstflug gewagt.
Ich habe damit gerechnet, dass die Parameter total falsch eignestellt sind und der TRI total unruhig sein würde und praktisch nicht zu fliegen, was aber dann passierte übertraf alle meine Erwartungen.
Der Tricopter fliegt besser als je zuvor.
Was als erstes auffiel, war, dass die Steuerung viel sanfter und gleichmäßiger ist als beim TriGUIDE. Auch schwebt der Tricopter viel ruhiger, was wohl an der Steuerung liegt. Alles in allem ging alles erschreckend glatt über die Bühne.
Jetzt ging es also ans eingemachte, Probleme Finden und eliminieren:
- Das Failsafe funktioniert nicht mit meiner QuadroPPM12, so dass bei einem Funkausfall der Copter einfach mit dem letzten Steuerbefehl weiterfliegt. Das habe ich geändert, jetzt wird das Failsafe ausgelöst, wenn keine Änderungen mehr auf den Kanälen sind. Das ist noch niocht perfekt aber ein Funkausfall wird zu 100% erkannt. Theoretisch kann es aber vorkommen, dass eine inaktivität als Funkausfall gedeutet wird.
- Ich habe für den Tricopter noch ein externes Board gebaut, auf dem sich ein Spannungsteiler zur Spannungsmessung und ein Piepser befinden, so kann ich die Spannung im Flug mit dem Controller messen und in Stufen über den Pieper warnen, auch werden Steuerbefehle und Bootsteps über den Pieper signalisiert, darüberhinaus habe ich einen Funkausfall mit Piepsen bedacht. Es wird nun ejde wichtige Info mit einem Piepen quittiert.
- Nächster Schritt war die Ansteuerung der Nick/Roll Kompensation, war bei der alten Steuerung hierfür eine Eigene Programmierung und eine eigene Stromversorgung der Servos Nötig, so war hier alles schon fertig, ich habe noch ein Stromverteilerboard gelötet und die Parameter für Drehwinkel in der Steuerung eingestellt und fertig war die Kompensation. Funktioniert sogar besser als vorher.
- Jetzt muss ich den Code nur mehr verstehen um meine weiteren Änderungen einzubauen
Jetzt ist zu klären ob ich mit dem Tricopter anch Fehmarn fahre oder ob ich es bis zum WE schaffe meinen QuadroX fertig zu bauen.
No comments:
Post a Comment